梯度消失和爆炸
deep后带来的信息传递/梯度传递问题
层数过多导致?sigmoid和tanh为什么会导致梯度消失?
- 直观解释:从深层网络角度来讲,不同的层学习的速度差异很大,表现为网络中靠近输出的层学习的情况很好,靠近输入的层学习的很慢,有时甚至训练了很久,前几层的权值和刚开始随机初始化的值差不多。
- 反向传播角度解释:由于反向传播过程中,前面网络权重的偏导数的计算是逐渐从后往前累乘的,如果使用激活函数如sigmoid,导数小于一,因此累乘会逐渐变小,导致梯度消失,前面的网络层权重更新变慢;如果权重 本身比较大,累乘会导致前面网络的参数偏导数变大,产生数值上溢。
梯度消失
- 原因:层数过多,学习率的大小,网络参数的初始化,激活函数的边缘效应
- 在深层神经网络中,每一个神经元计算得到的梯度都会传递给前一层,较浅层的神经元接收到的梯度受到之前所有层梯度的影响。如果计算得到的梯度值非常小,随着层数增多,求出的梯度更新信息将会以指数形式衰减,就会发生梯度消失。
梯度爆炸
- 原因:1)隐藏层的层数过多;2)权重的初始化值过大
- 在深度网络或循环神经网络(Recurrent Neural Network, RNN)等网络结构中,梯度可在网络更新的过程中不断累积,变成非常大的梯度,导致网络权重值的大幅更新,使得网络不稳定;在极端情况下,权重值甚至会溢出,变为$NaN$值,再也无法更新。
- 解决:1)用ReLU、Leaky-ReLU、P-ReLU、R-ReLU、Maxout等替代sigmoid函数。(2)用Batch Normalization。(3)LSTM的结构设计也可以改善RNN中的梯度消失问题。(4)进行梯度裁剪(clip), 如果梯度值大于某个阈值,我们就进行梯度裁剪,限制在一个范围内.(5)使用正则化,这样会限制参数 的大小,从而防止梯度爆炸。(6)设计网络层数更少的网络进行模型训练
LSTM为什么有助于解决梯度消失和爆炸问题?
https://www.zhihu.com/question/34878706
RNN 中总的梯度是不会消失的。即便梯度越传越弱,那也只是远距离的梯度消失,由于近距离的梯度不会消失,所有梯度之和便不会消失。RNN 所谓梯度消失的真正含义是,梯度被近距离梯度主导,导致模型难以学到远距离的依赖关系。
其一是遗忘门接近 1(例如模型初始化时会把 forget bias 设置成较大的正数,让遗忘门饱和),这时候远距离梯度不消失;其二是遗忘门接近 0,但这时模型是故意阻断梯度流的,这不是 bug 而是 feature(例如情感分析任务中有一条样本 “A,但是 B”,模型读到“但是”后选择把遗忘门设置成 0,遗忘掉内容 A,这是合理的)。当然,常常也存在 f 介于 [0, 1] 之间的情况,在这种情况下只能说 LSTM 改善(而非解决)了梯度消失的状况。
激活函数
1、优秀激活函数的性质
非线性–多层后能够逼近所有函数
可导–优化器大多用梯度下降更新参数
单调–能够保证单层网络的损失函数是凸函数
近似恒等性– f(x)近似=x,参数初始化为随机小值时,神经网络更稳定
输出均值为0 – 能够加速收敛
2、激活函数输出范围
有限 – 基于梯度更新参数更稳定
无限 – 调小学习率
3、sigmoid
导数范围在0-1/4,梯度消失问题
输出均值不为0,收敛慢
幂运算耗时高
4、tanh
梯度消失
幂运算耗时高
5、 relu
缺点:
输出均值非0
dead relu – 某些神经元永远不被激活,导致相应的参数无法更新
6、dead relu改进
负数输入过多导致,改变参数初始化避免过多的负数特征送入relu,设置更小的学习率,避免参数分布巨大变化
leaky – 虽然能解决dead,但实际效果中没有证明出比relu更好
初始化建议
均值为0
标准差为 sqrt(2/当前层输入特征个数)的正太分布
指数加权平均(Exponentially weighted average)
V_t=β*V_t−1+(1−β)*θ_t
1、当 β 较大时(β = 0.98 相当于每一点前50天的平均气温)。曲线波动相对较小更加平滑,因为对很多天的气温做了平均处理,正因为如此,曲线还会右移。
较小,0.5时,曲线波动相对激烈,但是它可以更快的适应温度的变化。
2、当 β = 0.9时,我们可以近似的认为当前的数值是过去10天的平均值,但是显然如果我们直接计算过去10天的平均值,要比用指数加权平均来的更加准确。但是如果直接计算过去10天的平均值,我们要存储过去10天的数值,而加权平均只要存储V_t−1
3、指数加权平均 不能很好地拟合前几天的数据,因此需要 偏差修正
在机器学习中,多数的指数加权平均运算并不会使用偏差修正。因为大多数人更愿意在初始阶段,用一个捎带偏差的值进行运算。不过,如果在初试阶段就开始考虑偏差,指数加权移动均值仍处于预热阶段,偏差修正可以做出更好的估计。
V_t = V_t / (1 - β_t)
优化器
GD 到 BGD 到 SGD–即minibatch的SGD(现在说SGD一般都指MBGD),
BGD即每次权值调整发生在批量样本输入之后,而不是每输入一个样本就更新一次模型参数。这样就会大大加快训练速度。
SGD即每次从百万数据样本中,取几百个数据点,算一个SGD梯度,更新一下模型参数。
步骤:
1、计算 t时刻损失函数关于当前参数的梯度 g_t = ▽loss
2、计算 t时刻的一阶动量m_t和二阶动量 v_t
3、计算 t时刻下降梯度 n_t = lr * m_t/sqrt(v_t)
4、计算t+1时刻的梯度即 w_t+1 = w_t - n_t
其中一阶动量是,梯度相关的函数
二阶动量是,梯度平方相关的函数
1、SGD
m_t = g_t
v_t = 1
SGD每次都会在当前位置上沿着负梯度方向更新(下降,沿着正梯度则为上升),并不考虑之前的方向梯度大小等。
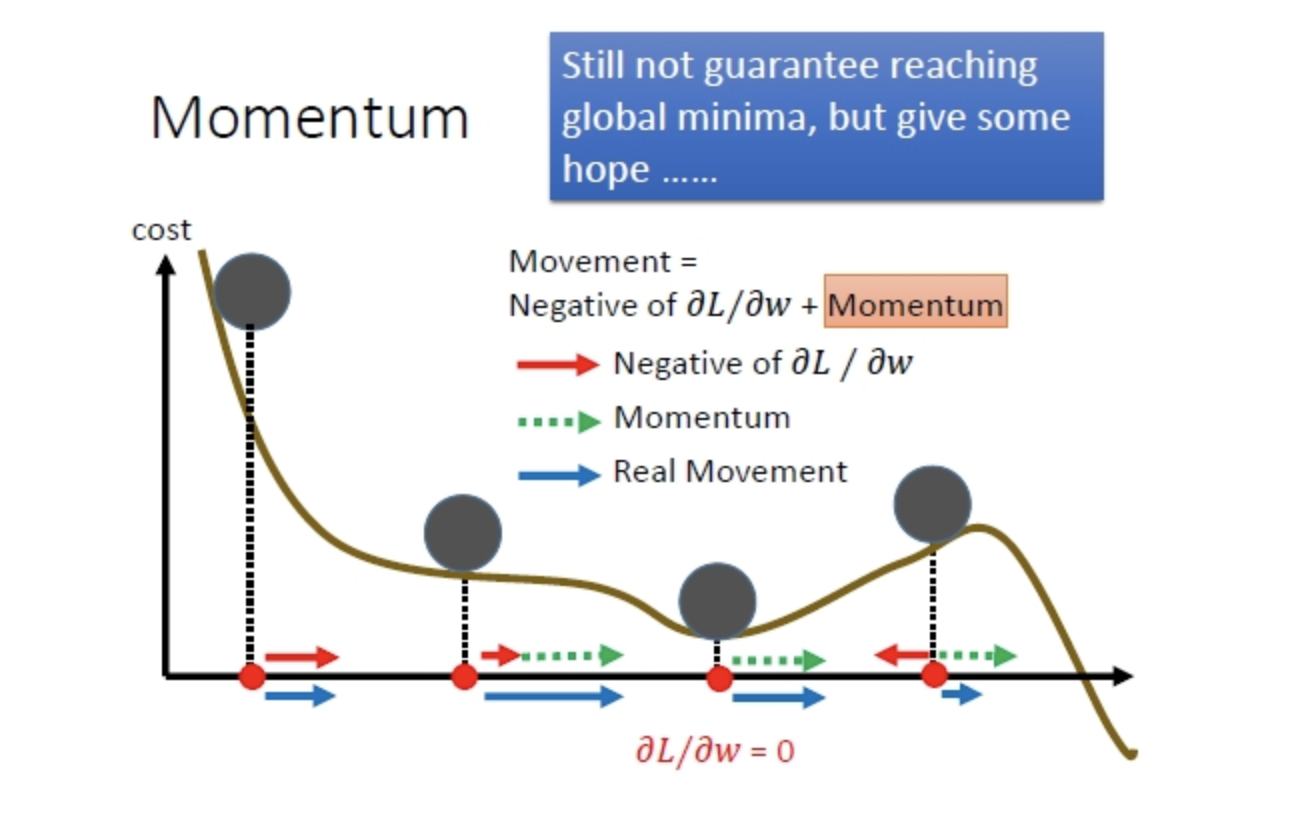
动量(moment)通过引入新的变量去积累之前的梯度(通过指数衰减平均得到),得到加速学习过程的目的。
若当前的梯度方向与累积的历史梯度方向一致,则当前的梯度会被加强,从而这一步下降的幅度更大。若当前的梯度方向与累积的梯度方向不一致,则会减弱当前下降的梯度幅度。如下图
2、SGDM 含有momentum的SGD
m_t = θ * m_t-1 + (1 - θ) * g_t – 指数加权平均
v_t = 1
初始化,m_t = 0
3、Ada 引入了二阶动量
m_t = g_t
v_t = ∑ g_t^2
优点:对于梯度较大的参数,意味着学习率会变得较小。而对于梯度较小的参数,则效果相反。这样就可以使得参数在平缓的地方下降的稍微快些,不至于徘徊不前。
缺点:由于是累积梯度的平方,到后面累积的比较大,会导致梯度消失。
在凸优化中,AdaGrad算法具有一些令人满意的理论性质。但是,在实际使用中已经发现,对于训练深度神经网络模型而言,从训练开始时累积梯度平方会导致学习率过早过量的减少。AdaGrad算法在某些深度学习模型上效果不错,但不是全部。
Adadelta
Adadelta是对Adagrad的改进,主要是为了克服Adagrad的两个缺点(摘自Adadelta论文《AdaDelta: An Adaptive Learning Rate Method》):
the continual decay of learning rates throughout training
the need for a manually selected global learning rate
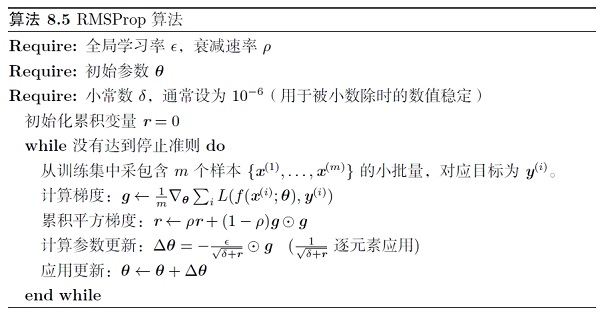
4、RMSProp
m_t = g_t
v_t = θ * v_t-1 + (1 - θ) * g_t^2
RMSprop也是对Adagrad的扩展,以在非凸的情况下效果更好。和Adadelta一样,RMSprop使用指数加权平均(指数衰减平均)只保留过去给定窗口大小的梯度,使其能够在找到凸碗状结构后快速收敛。
在实际使用过程中,RMSprop已被证明是一种有效且实用的深度神经网络优化算法。目前它是深度学习人员经常采用的优化算法之一。keras文档中关于RMSprop写到:This optimizer is usually a good choice for recurrent neural networks.
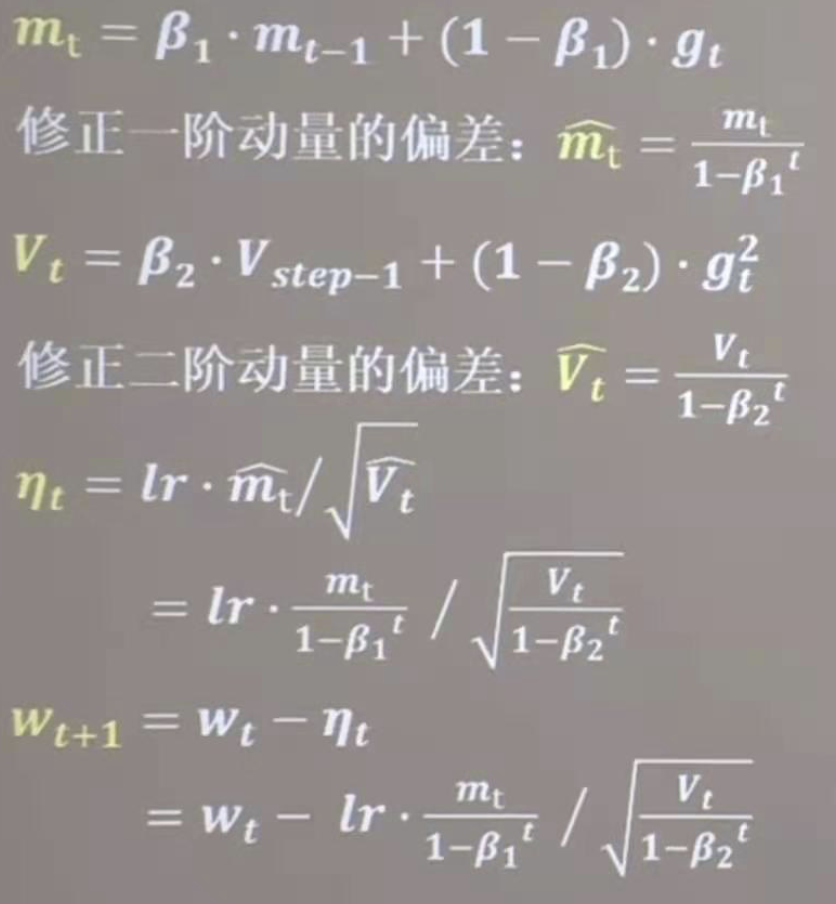
5、Adam
Adam实际上是把momentum和RMSprop结合起来的一种算法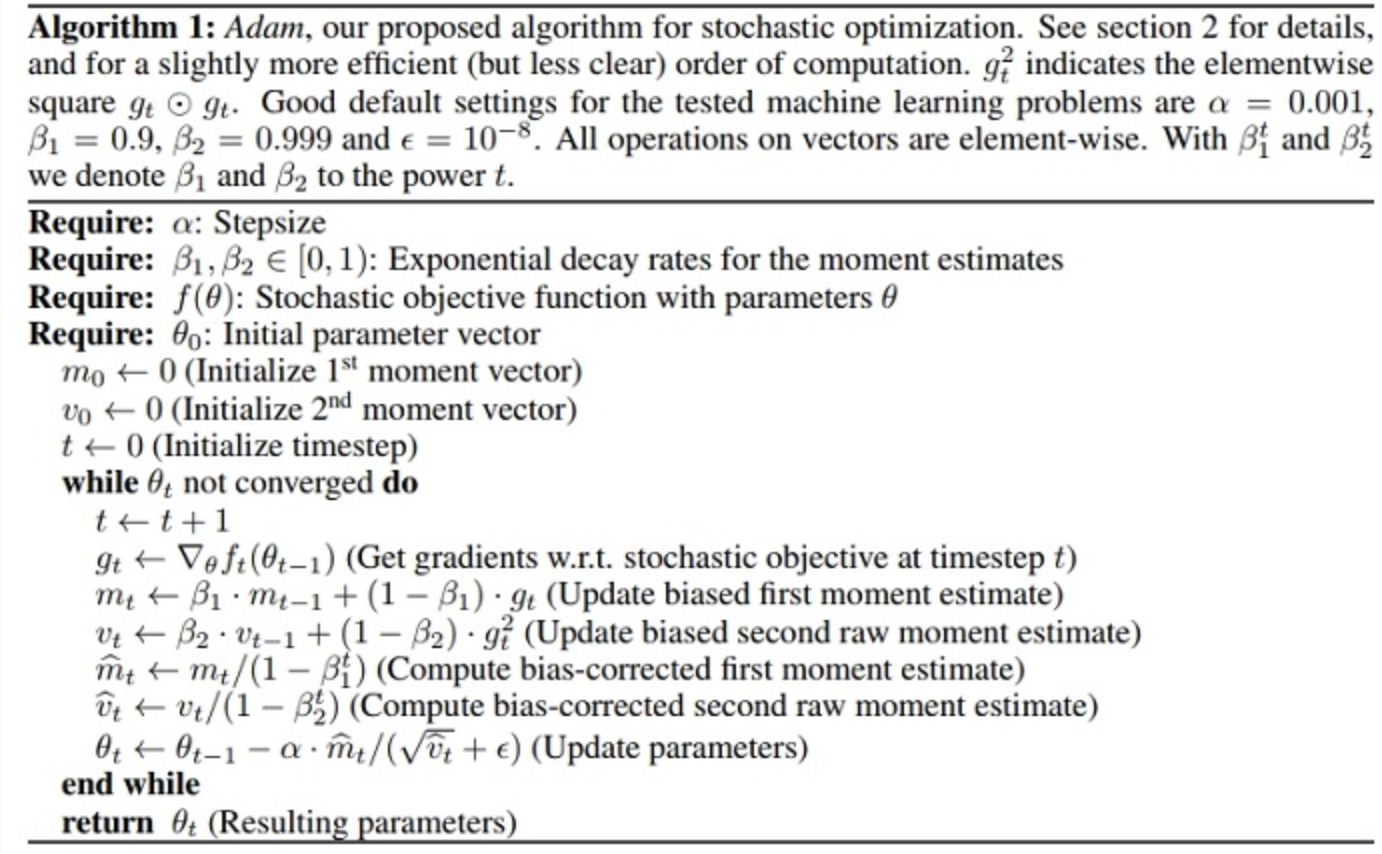
reference:
https://ruder.io/optimizing-gradient-descent/index.html
本文链接: https://satyrswang.github.io/2021/02/04/梯度/
版权声明: 本作品采用 知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议 进行许可。转载请注明出处!

